Keynotes


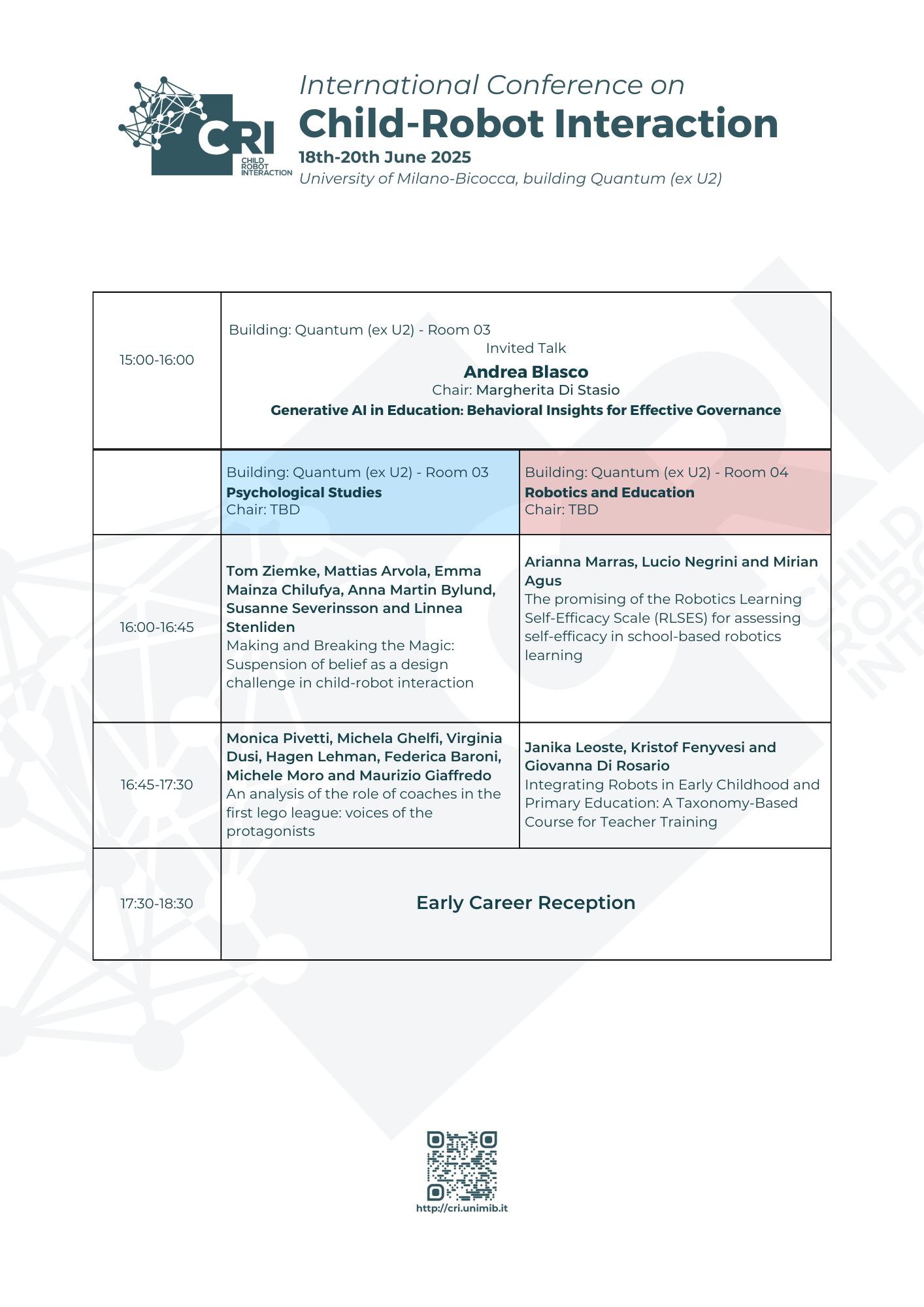
Andrea Blasco: Generative AI is rapidly transforming education, influencing student behaviours, motivation, and cognitive biases in ways that are still being uncovered. In this talk, I explore how generative AI tools, like AI chatbots, influence learning experiences, from fostering creativity to reinforcing biases. I examine the psychological and behavioural mechanisms behind student engagement with AI-generated content. Drawing on insights from recent experimental work with k-12 students, I discuss strategies and policy recommendations to ensure these technologies enhance learning outcomes while mitigating risks.

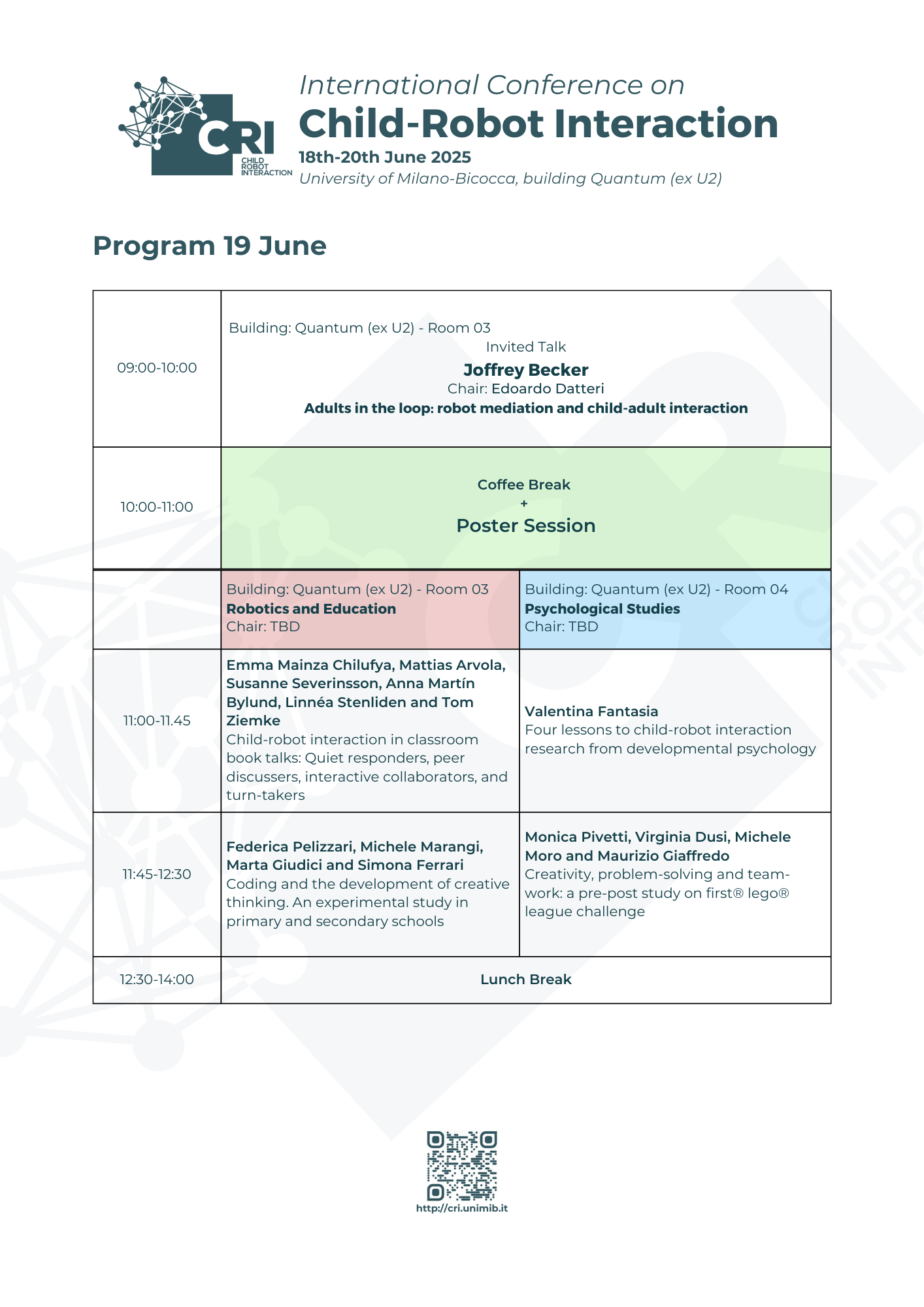
Joffrey Becker: Robots and intelligent systems have long given rise to a fear of replacement. This is particularly significant in work situations. Childcare is no exception. However, the empirical study of human-robot relations reveals a situation that is more complex than it appears. The inclusion of robots and intelligent systems in adult-child relationships is part of a variety of trends, meets a variety of needs and raises specific social and ethical issues, where robots play a pivotal role. In this presentation, I will describe three interrelated forms of mediation. The first involves technically replacing the adult during the interaction (without, however, completely getting rid of the sometimes naive representations that adults have of children). The second leads the adults to focus not only on interacting with the children, but also with a robot that needs to be programmed in order to be involved in relevant activities. The third involves the adult relying on the robot to create a shared space for interacting with the children. These three ways of using robots lead to think about the links between different mediation chains. They also encourage us to take a closer look at the role of adults in their relations with children, showing how important it is to maintain their presence in the interactions between children and technical objects, whether at the level of conception and design or that of educational support.

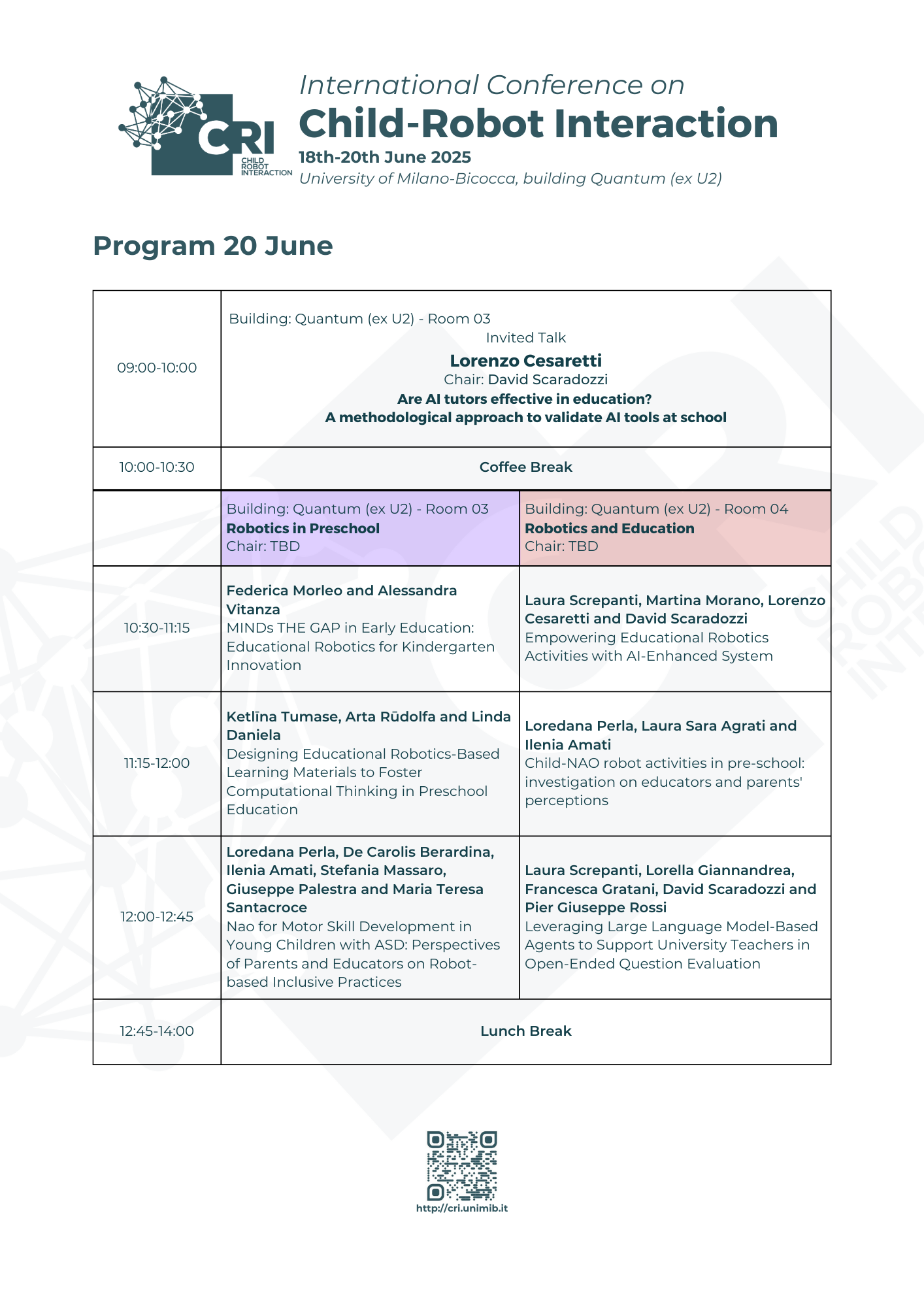
Lorenzo Cesaretti: Are AI tutors effective in education? A methodological approach to validate AI tools at school.
This keynote presents a robust framework for evaluating AI tutoring systems in educational contexts. We introduce a four-phase methodology that bridges pedagogical theory with technological implementation, demonstrated through the askLea platform case study. Our innovative approach combines expert assessment with LLM-powered analysis to verify pedagogical alignment at scale. This method offers educators precise insights beyond generic evaluations, establishing pedagogical validation as essential for responsible AI implementation in schools while maintaining a human-centered educational
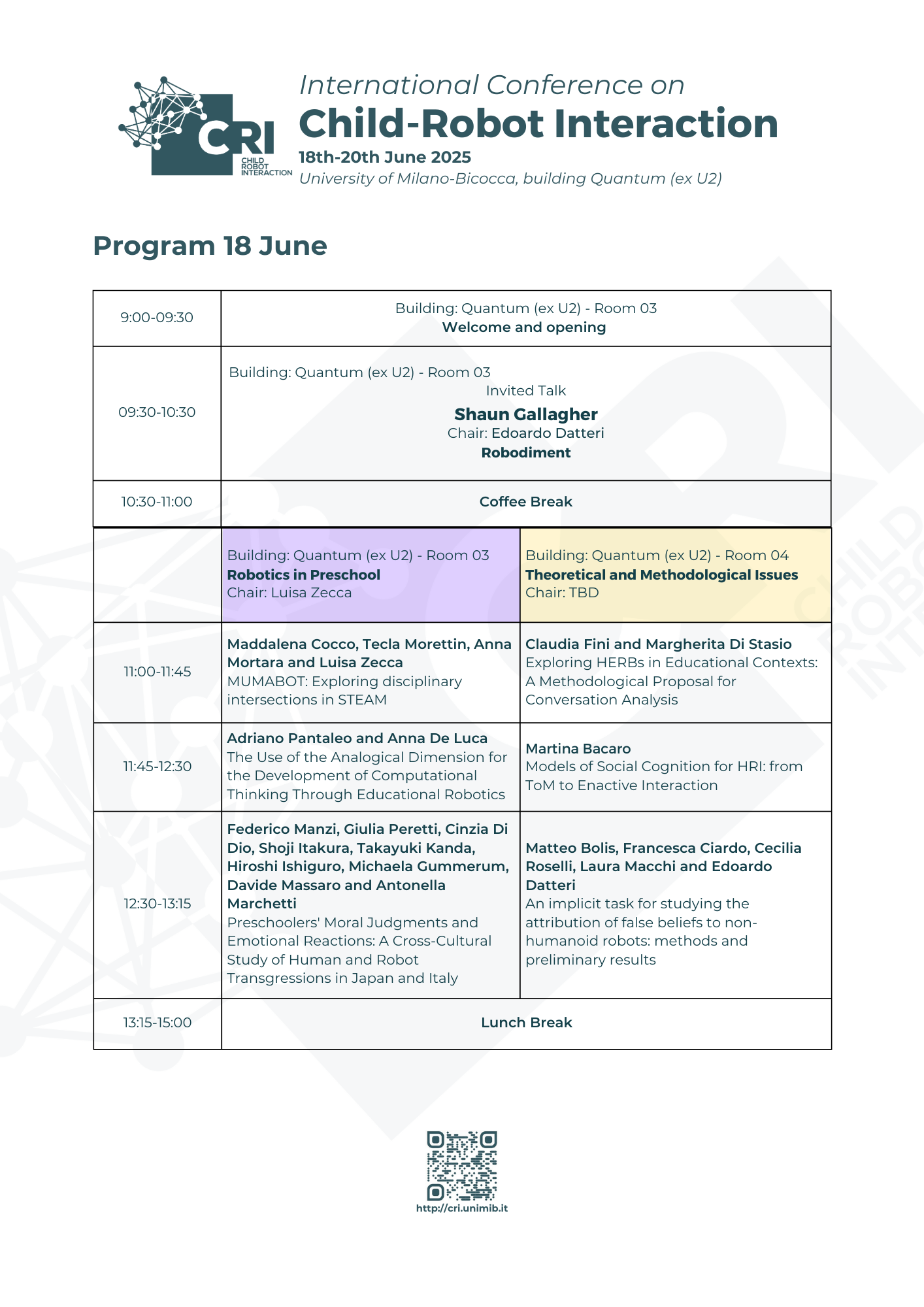
Programme